Mobir M2
#Einleitung

Die M2 ist meine dritte Wärmebildkamera. Sie wurde kurz nach der Fluke Ti10 erworben. Nachdem ich beide miteinander verglichen habe, habe ich mich dazu entschlossen, die Ti10 wieder zu verkaufen und bei der M2 zu bleiben.
Aufgrund meines Einsatzes in der Elektronik, setzte ich etwas andere Anforderungen, als es jemand auf dem Bau tun würde.
- geringer Mindestfocusabstand
Je näher ich einem Objekt kommen kann, ohne dass es unscharf wird, desto größer erscheint es auf dem Display und umso besser ist die Qualität des Bildes. - geringe Abmessungen
Wichtig im inneren von Geräten wie z.B. einem PC-Gehäuse. - Videoausgang
In Verbindung mit einem Videograbber für den PC, eine wichtige Vorraussetzung für Wärmevideos. Diese sind sehr hilfreich bei dynamischen Ereignissen wie eine schnelle Bauteilerwärmung.
- Auflösung
- 120x120
- Temperaturbereich
- -20 bis +250
- Mindestfocusabstand
- 10 cm
- TFT Anzeige in Zoll
- 2.2" Display
- Transfer zum PC
- USB
- Framerate
- 50 Hz
- Farbpaletten
- 5
- Abmessungen
- 120mm x 60mm x 30mm
- Gewicht
- 0.265 kg
- Einschaltzeit
- ca. 45 sec (1 min bei AV)
- Sonstiges
- eingebaute Analysefunktion der Bilder
- automatischer Hotpoint finder
- Laserpointer
- 2x Digitalzoom
#Der erste Umbau

Im Urzustand war die Kamera schön klein und leicht, aber nicht vom Pc Steuerbar und hatte auch keinen visuellen Sichtbereich.
Der Plan war relativ einfach: Kameratasten über Optokoppler ansteuerbar machen und eine USB-Kamera ran bauen, um den visuellen Bereich abzudecken.
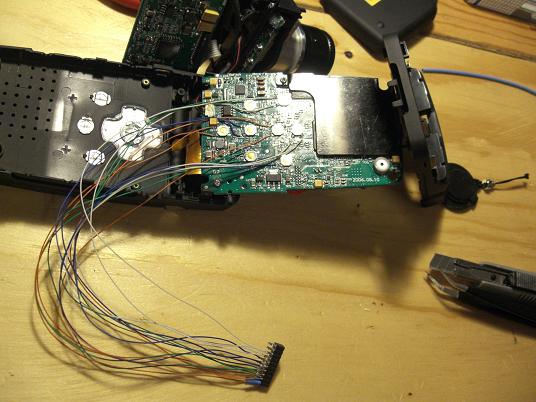
Nachdem die Kamera erstmal offen war, dauerte es nicht mehr lange, bis der vordere Bereich mit den Steuertasten zugänglich war. Im folgenden Bild, sind schon alle Tasten "angezapft" worden. Damals, waren sie über eine Steckerleiste nach außen geführt worden, da ich zu diesem Zeitpunkt noch nicht vorhatte, alles ein zu bauen. Es war zu diesem Zeitpunkt möglich, jede Taste an der Kamera von dieser Steckerleiste aus zu bedienen, indem man die jeweiligen Kontakte einfach überbrückte.
Es folgt der erste Schaltungstest für die Optokoppler.
#Optokoppler
Optokoppler sind Elektronische Bauteile, die rückkopplungsfrei Signale übertragen können. Sie bestehen meistens aus Fotodiode (Sender) und Fototransistor (Empfänger).
Es ist im Prinzip ein Zweifachwandler. Elektrische Energie (Strom) wird zur Optischen Energie (Licht) welche dann wieder die elektrische Energie am Ausgang beeinflusst. Rückkopplungsfrei ist er deswegen, weil die eigentliche Verwendung des Lichts für den Sender egal ist. Ob der Ausgang kurzgeschlossen, unbelastet oder abwechselt genutzt wird, ist für den Sendekreis nicht bemerkbar... dieser sendet davon unbeachtet weiter vor sich hin.
Bei mir wird der Optokoppler als Schalter eingesetzt. Wenn vorne eine Spannung anliegt, ist der Ausgang fast überbrückt. Wenn nicht, ist der Ausgang fast offen.
#Testschaltung
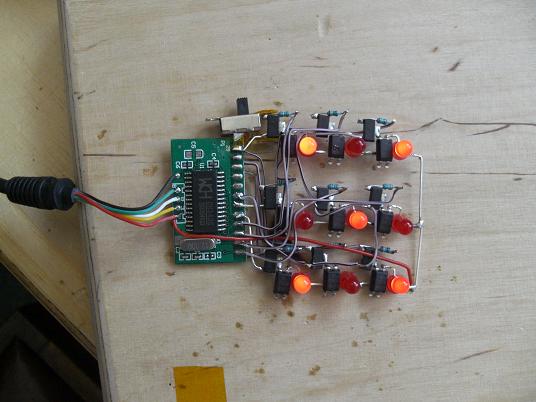
Bei der verwendeten Schaltung, wird ein Signal vom PC (über USB), auf einer Platine zu einem Binären Signal (1 und 0) an einem Signalpin umgesetzt. Dieses Signal wird über einen Schalttransistor als Verstärker, an den Optokoppler und eine LED weitergegeben.
Jetzt kann über den PC einer der Kanäle (insgesamt 9), ein oder ausgeschaltet werden. Je nachdem ist dann der Optokoppler Ausgang geschlossen und die LED an... oder umgekehrt.
Eine der Signalleitungen darf nicht vor der Verbindung mit dem PC an einen Schalttransistor verbunden werden. Diese Signalleitung wird bei der Anmeldung des Gerätes an das PC-System benötigt. Würde ich den Schalter nicht öffnen, bevor ich die Schaltung über USB verbinde, dann würde die Platine sich als anderes Gerät am PC anmelden und könnte nicht gesteuert werden. Die Umsetzungsplatine stammt von einem USB Experimentiergerät namens "USB OUT9" von Abacom.
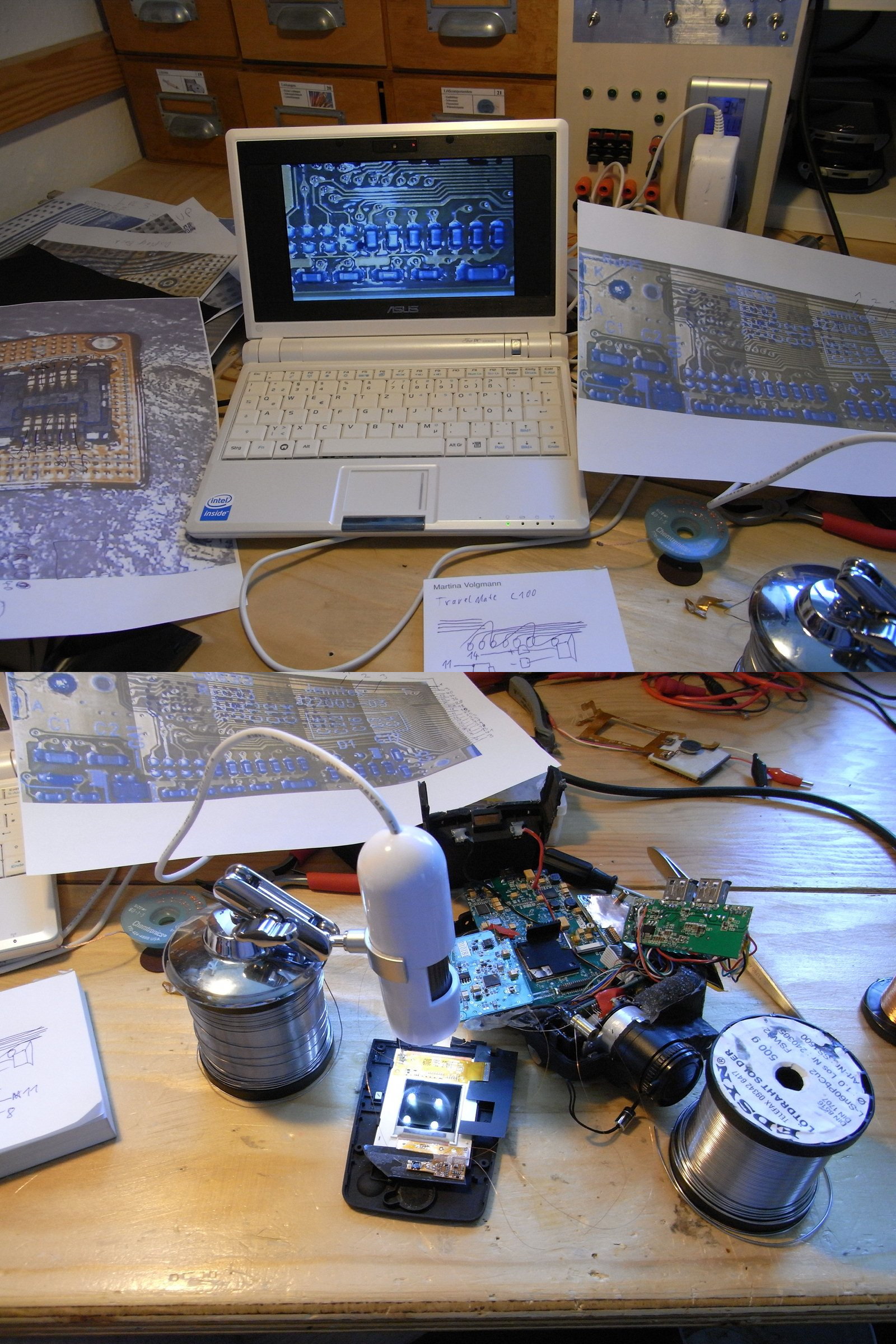
In der nächsten Stufe, kommt die Kamera hinzu. Damit die Kamera möglichst gute Fusionsbilder machen kann, hab ich mir als Ziel gesetzt, die Infrarotkamera parallel zur Visuellen Kamera zu verbinden. Dafür hab ich den Abstand zwischen IR und Visueller Kamera (eine Standard USB Webcam) gemessen und auf eine Pappkartontafel übertragen.
Dann wurden beide Videosignale auf spezielle Ziele ausgerichtet:
Infrarot wurde als erstes auf die Mitte der Pappe ausgerichtet. In der Mitte ist ein Kaltleider als Markierung eingebaut.
#Kaltleiter

Der Kaltleiter ist variabler Widerstand. Dessen Wert ändert sich im Verhältnis zu seiner Umgebungstemperatur. Je Kälter es ist, desto besser leitet er.
Deshalb ist er als Ziel ideal. Wenn ich Spannung anlege, ist der Widerstand noch kalt und demzufolge sehr leitfähig. Der durch ihn fließende Strom erwärmt in so lange, bis er den Strom durch seine eigene Temperatur begrenzt. Diese Temperatur hält er dann relativ stabil, da er bei Temperaturhänderungen sich selbst wieder Einpegeln würde (durch die Regulierung des Stromes).
Heißleiter ist genau das umgekehrte. Dieser wird beispielsweise gerne in Lüftersystemen eingesetzt. Der Kühlkörper einer CPU z.B. würde durch sein heiß werden, dem Lüfter mehr Strom zukommen lassen, wodurch der sich dann schneller dreht. Dann sinkt auch die Lüfterdrehzahl, wenn der Kühlkörper nicht all zu warm ist (z.B. bei geringerer CPU last). Das aber nur nebenbei, weil ich gerade so schön am Sätze formulieren bin.

Vom Kaltleiter aus (IR-Ziel), wurde eine Markierung für die Visuelle Kamera gemacht. Die Entfernung entspricht wie gesagt, dem Abstand in der Mitte von beiden Optiken zueinander.
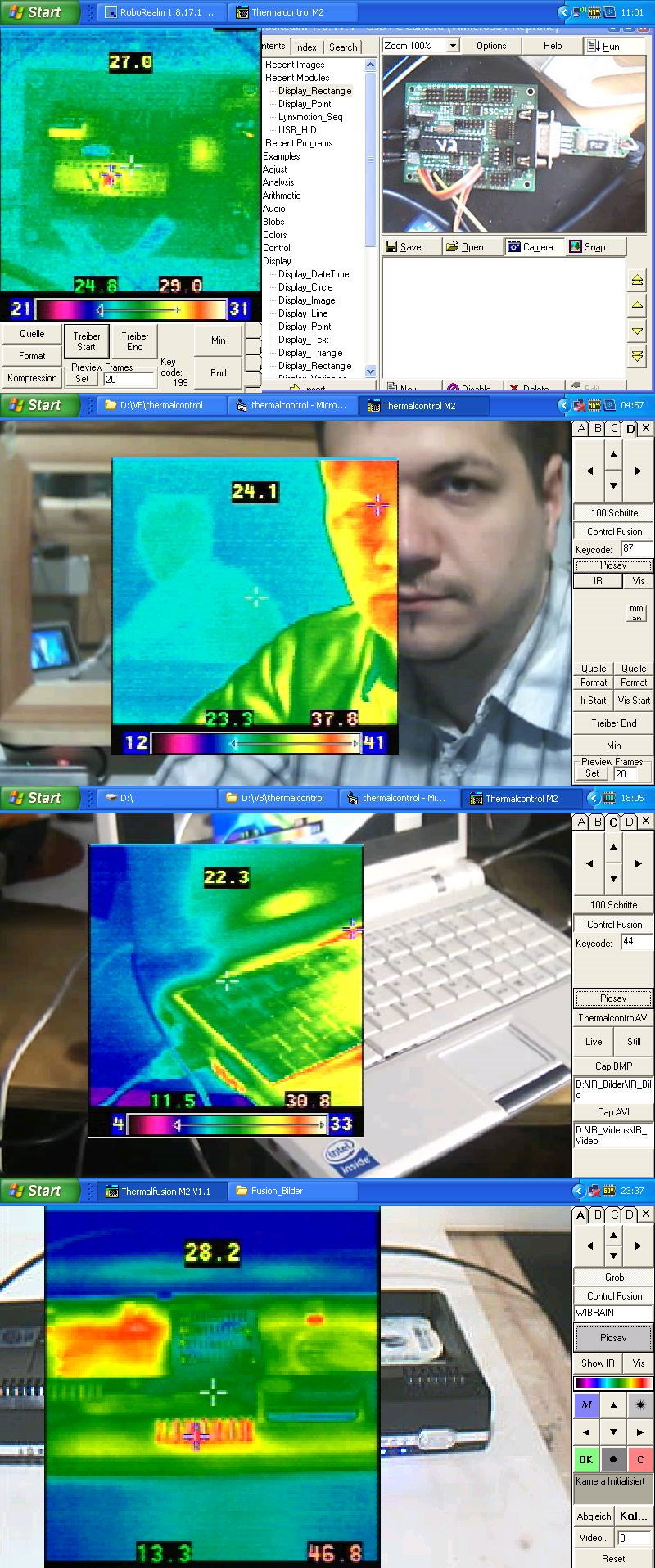
Visuell wurde mit einem Programm namens Roborealm ausgerichtet. Diese Software ist zu vielseitig um sie hier zu beschreiben. Ich habe dort genau in der Mitte ein Kreuz einblenden lassen und danach die Kamera ausgerichtet bis der Kleber fest war.
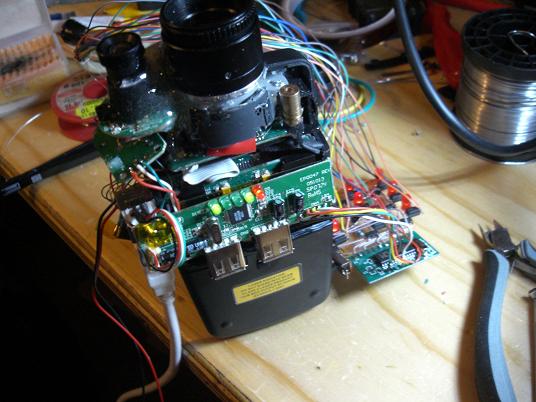
Nachdem die Visuelle Kamera angeklebt wurde, ist noch ein 4 Port USB Hub hinzugekommen. Dieser soll es ermöglichen, die Kamera als ein Gerät mit dem PC zu verbinden. Am Hub sind die beiden äußeren Ports durch die Kamera belegt (USB Webcam und USB OUT9). Die Steuerungsschaltung ist noch im Testaufbau vorhanden, aber über den Pc schon frei steuerbar.
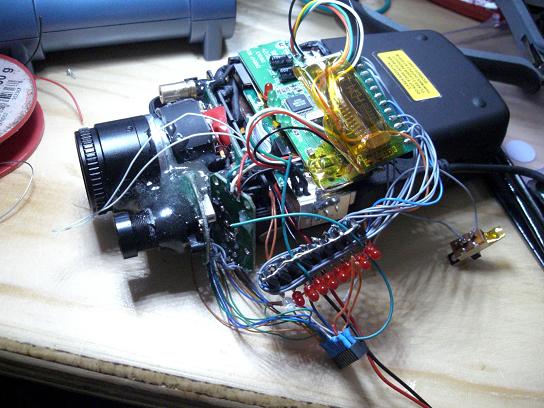
Der nächste Schritt sieht erstmal recht einfach aus, aber eine ziemliche Fummelei war es dennoch. Hier wurde die Steuerschaltung minimiert, da ich natürlich nach wie vor an einer kleinen Kamera interessiert bin.

Im letzten Abschnitt des Umbaus, geht es um ein adäquates Gehäuse. Ich hab dafür Teile eines Notebook Accu’s verwendet.


Als erstes ein Blick auf die Rückseite mit dem USB-B Anschluss auf der Seite und 2 freien Ports für Speichersticks oder ähnliches. Die LED’s des USB Hubs sind nur von unten sichtbar. Aber so oft schaut man da ja eh nicht rauf.
#Softwareentwicklung
Die letzten Schritte des Umbaus bezogen sich nicht auf die Kamera, sondern auf ihre Steuerung vom PC aus.
Die erste Software wurde damals mit Profilab zusammengesetzt. Aber gerade in Hinsicht auf Systemressourcennutzung und Makros, war dies definitiv nicht die beste Wahl.
Programmiert habe ich dann in Visual Basic was mir auch die Möglichkeit gab, die Videotreiber direkt mit ein zu binden.
Die nächste Stufe hatte es in sich. Vor allem wegen den Videotreibern.
Wenn ich ein Webcam Programm neben dem anderen gestartet hab, klappte alles wunderbar, auf beiden Rechnern. Bei meinem Desktop hatte ich immer abstürze in VB wenn ich 2 Videotreiber gleichzeitig nutzte. Auf dem Notebook war dies nicht der Fall. Da aber das Notebook die eigentliche Zielplattform zur Nutzung war, habe ich diese Vorkommnisse nicht all zu lange weiterverfolgt.
Die Software bestand aus 3 Einzelteilen in einem Programm. Jedes Video hatte eine eigene Form (Ebene) und eine dritte Ebene für die Steuerung. Die 2 Videoformen liegen übereinander. Beide können in ihrer Größe angepasst werden, wodurch sich auch die Videos entsprechend Strecken und denen. Die Infrarotebene kann zudem frei bewegt werden. Es ist also über die Steuerungssoftware möglich, nachdem die Kamera auf ein Objekt gerichtet ist, diese Videoebenen so aus zu richten, dass sie direkt ineinander übergehen.
#Reparaturversuch
Die Kamera ist mal vom Stativ gefallen und dabei ist das Klapp-Display abgerissen. Ich versuchte den Flex zu reparieren, musste nach einiger zeit aber einsehen, das ich es nicht hin bekomme.
Zuletzt geändert am: Aug 08 2012 um 4:43 AM