Alpha Lepton
#Einleitung
Grundgedanke des ersten Aufbaus war ein Lepton Core mit USB Adapterboard zu verwenden. Dadurch wird der Core als USB-Webcam verfügbar und in der Weboberfläche sichtbar.
Die Kamera sollte in das Gehäuse einer IP-Netzwerkkamera eingebaut werden, denn die hat eine Pan/Tilt Funktion (neig- und schwenkbar).
Im Grunde sollte es danach also wieder eine Netzwerkkamera sein, nur als Wärmebildkamera mit eigener Steuerung.
#Aufbau

Hier wird die Versorgung auf 2 DcDc-Wandler verteilt:
Der erste liefert genug für den Festspannungsregler dahinter und sorgt für stabile 5V an der Versorgung des OPZ.
Der zweite lieferte etwas mehr und sorgte für die Versorgung der Motoren.
Diese Motoren waren Schrittmotoren, die über den A4988 Chip betrieben wurden. Diese Motor-Treiber sind inzwischen in vielen 3D Druckern verbaut und leicht verfügbar.
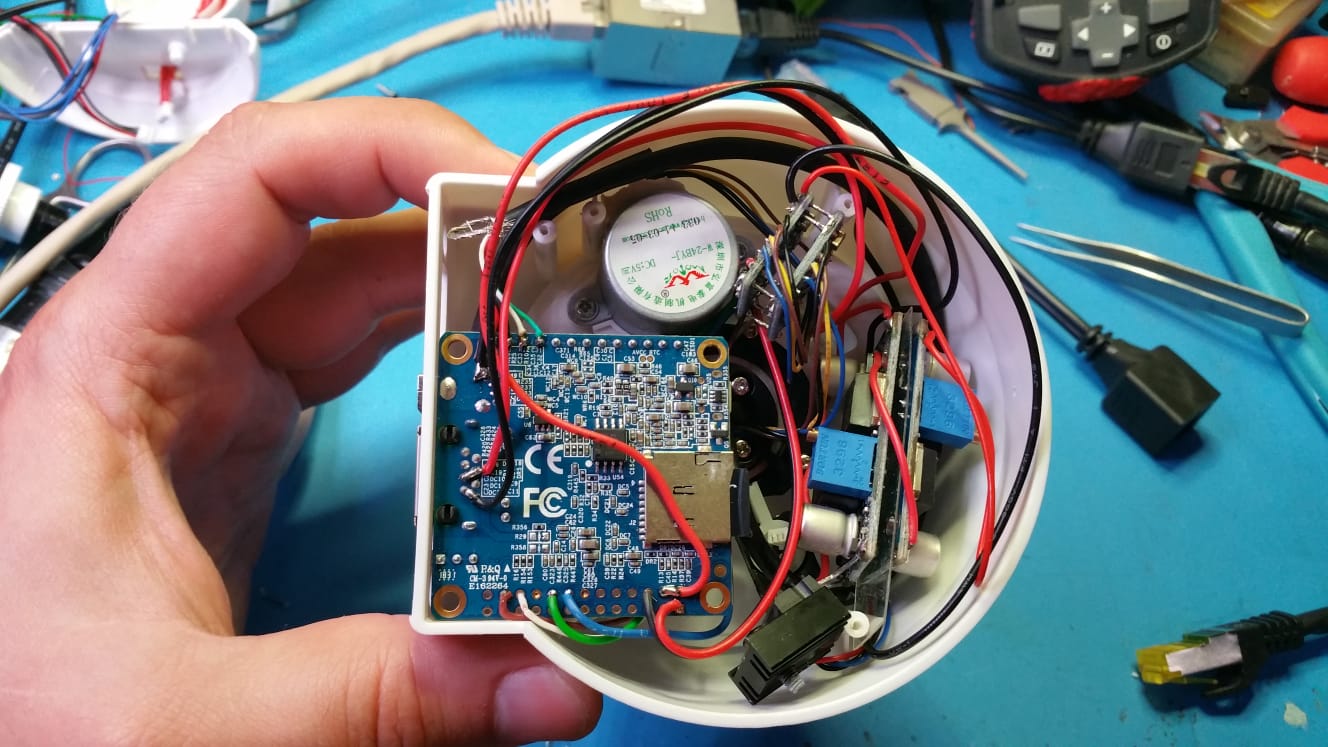
Hier sind alle Komponenten im Inneren des Kameragehäuses eingebaut.
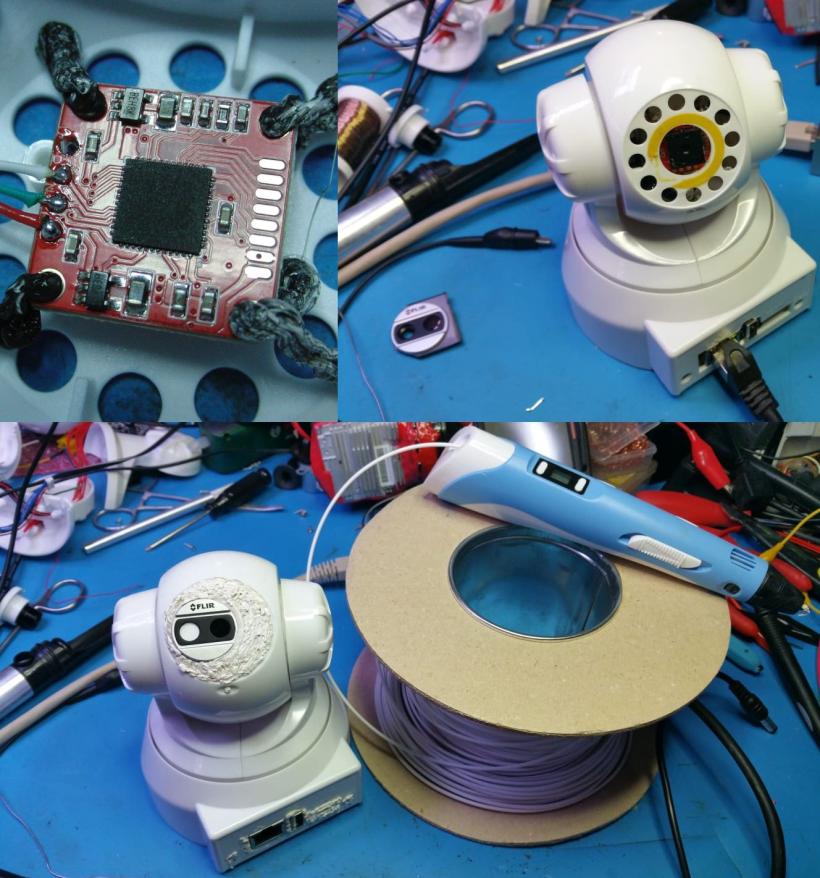
Wie oben zu sehen, ist die Platine mit dem Lepton Sensor mit Kunststoff befestigt worden. Dafür hab ich einem 3D Druckstift verwendet.
Später wurde ein Teil des Gehäuses einer Flir One verwendet, weil ich das IR-Fenster für die Kamera brauchte.
Unten sieht man das fertige Gehäuse, offene Stellen wurden wieder mit einem 3D-Druckstift verschlossen.
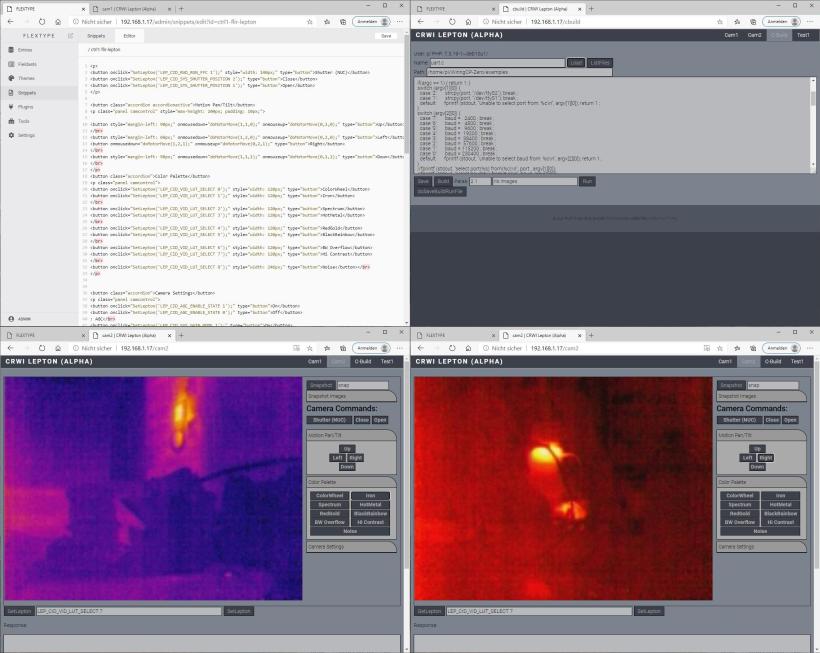
Parallel zur Hardware wurde auch die Webseite bearbeitet. Ich verwende das CMS Flextype, weil ich damit recht einfach die Hardwarezugriffe umsetzen konnte.
#Fertige Kamera
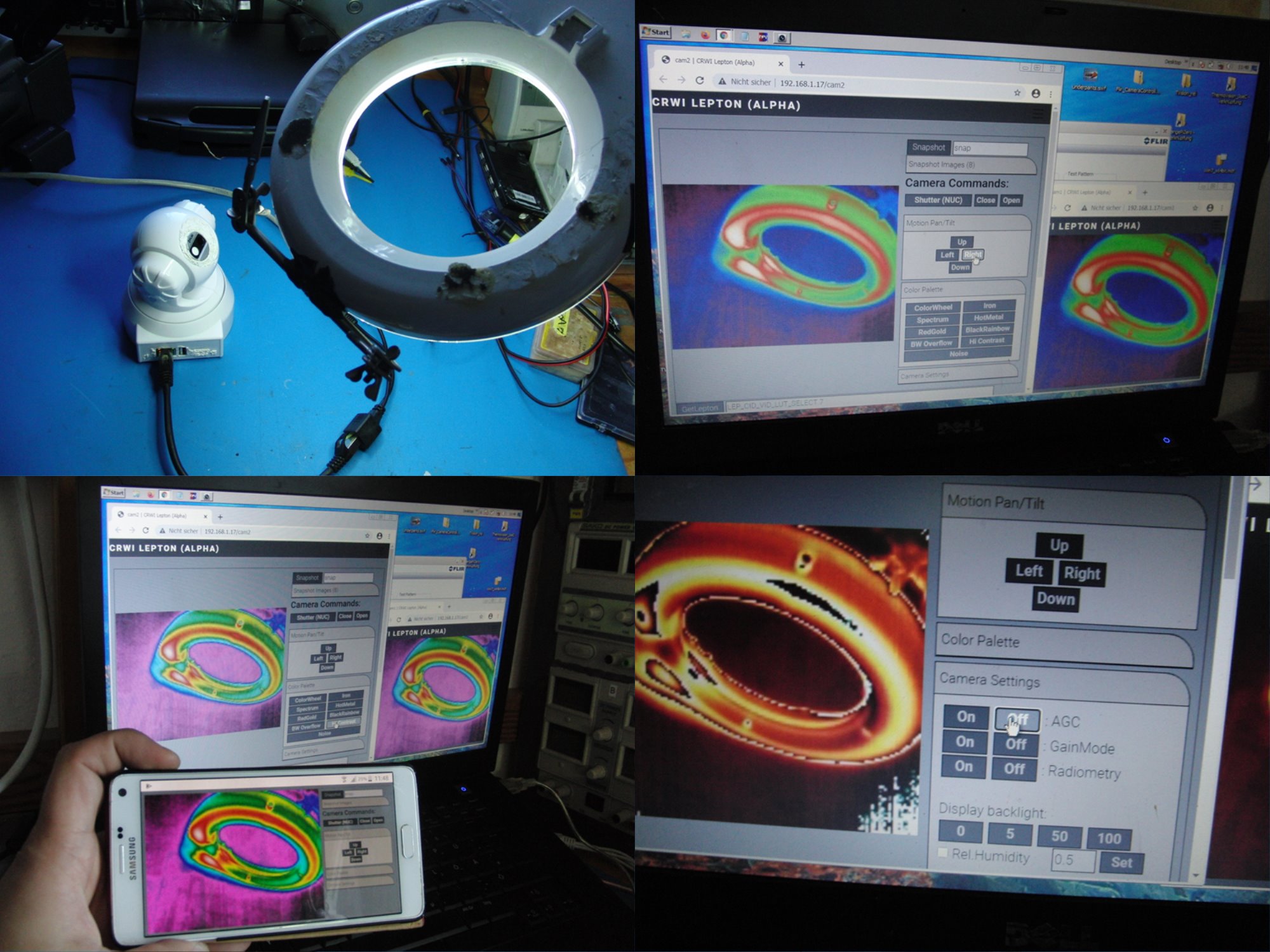
Die Webseite kann gleichzeigt von verschiedenen Geräten geöffnet werden, alle sehen das gleiche und alle können die Kamera steuern.
Die Motoren werden sehr einfach gesteuert. Ein Digital Output erzeugt eine Niederfrequente Schwingung am Step Eingang des A4988.
2 weitere Outputs gehen an die Enable Eingänge (diese entscheiden darüber, ob die Motoren sich bewegen).
1 Output geht an beide DIR Eingänge.
Funktionsweise des A4988 Chips.
Wenn ein Takt auf den Step Eingang geht, entscheidet der Zustand des DIR Eingangs in welche Richtung es geht und der Enable Eingang, ob sich der Motor überhaupt bewegt.
Pan/Tilt der Kamera:
Die Weboberfläche hatte 4 Buttons wie ein Steuerkreuz. Wenn man auf den Button geklickt hat wurden DIR und Enable entsprechen eingestellt und die Blickrichtung der Kamera wanderte so lange wie man den Button gedrückt hielt.
Hier noch ein paar Bilder die mit der Kamera aufgenommen wurden.
Während ich an der Alpha Version gebastelt habe, fiel die Entscheidung die eigentliche Steuerung von einem MiniStm32 Board übernehmen zu lassen.
Anstatt die Alpha wieder umzubauen hab ich sie einfach verkauft und mit der Beta neu angefangen.